
🔥 实战痛点解析
在五轴加工领域,后处理不是写出来就行,是要能跑、能打表、能稳定产出合格件的。多少同行死在后处理的坑里,不是G代码不对付,就是机床运动学没搞懂,或者干涉避让处理不到位,一个不小心就过切,直接报废工件,甚至撞机。尤其是海德汉系统,变量、宏程序复杂得让人头大,想靠自己摸索,耗时耗力,关键是,你可能永远也找不到那个最优的刀路。
📚 教程核心价值
硬核要点:本套教程直击hyperMILL五轴后处理定制痛点,深度解析海德汉TNC530系统下的各项核心参数配置与宏程序编写技巧。从刀心/刀尖输出补偿、刀具半径补偿RR/RL/R0的实战运用,到Vericut与hyperMILL的无缝联调,帮你彻底解决复杂摆头、双摆台机床的3+2定位与五轴联动刀路优化难题,让你告别盲调,精准驾驭后处理,产出最高效、最安全的CNC程序。
| 教程深度:高级实战 | 软件环境:hyperMILL 2019, Vericut |
| 资源容量:13.05 GB | 适合人群:高级数控编程员、后处理开发工程师、机床调试工程师 |
| ⚠️ 排坑避雷:本教程基于 hyperMILL 2019 及更高版本、Vericut 8.x 或更高版本录制,请确保电脑安装了同等或更高版本的软件,否则将无法打开练习图档! | |
📋 完整实录目录
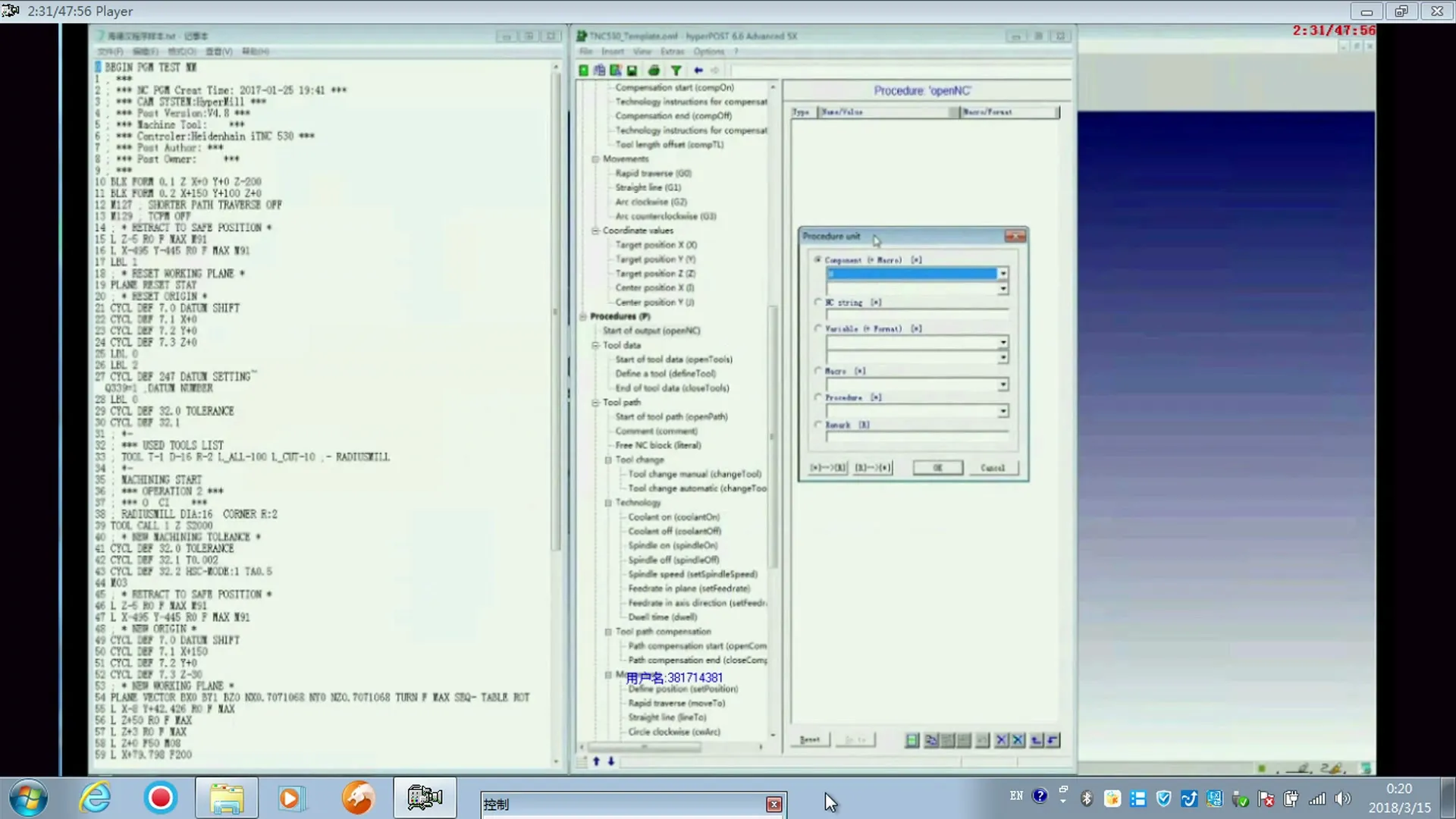
📺 实机操作画面预览
🛠️ 核心干货提炼
海德汉TNC530五轴后处理深度定制与宏程序优化
精准打造TNC530专属的五轴后处理,告别通用模板的各种水土不服。深入剖析刀心/刀尖输出、刀具半径补偿(RR/RL/R0)的底层逻辑,并通过宏程序手段,精简多余的3+2复位动作,让你的G代码更高效、更纯粹。
hyperMILL与Vericut无缝集成仿真验证,杜绝过切
实战中,程序仿真就是你的二次保险。本教程教你如何将hyperMILL与Vericut完美联接,在虚拟环境中提前捕捉并修复后处理潜在的BUG,如干涉、过切、不合理的下刀路径等,将风险扼杀在萌芽状态。
复杂摆头/双摆台机床运动学配置与刀路优化
针对摆头机床和双摆台机床的特有运动模式,深入讲解3+2定位与联动刀路的下刀优化设置。通过Vericut仿真验证,确保在不同机床构型下,刀具路径的平稳过渡与高效切削,避免撞机和不必要的空行程。
💡 学习者 FAQ 解答
Q1: 在hyperMILL中,如何确保海德汉TNC530的刀心与刀尖输出能够实现准确的自动补偿?
A1: 这玩意儿的核心在于后处理中对TNC530变量的精准调用与逻辑判断。教程里会详细拆解如何通过宏程序,结合机床结构参数,自动识别并修正刀具长度与半径的实际补偿值,让刀心与刀尖的G代码输出与实际切削路径完美匹配,避免跑偏或过切。
Q2: Vericut仿真在调试hyperMILL的五轴后处理过程中,具体能帮我发现哪些难以察觉的BUG?
A2: Vericut就是你的火眼金睛。它能提前模拟机床所有运动轴的真实轨迹,发现后处理生成的G代码中隐藏的干涉点、非预期复位、错误的下刀方式,甚至是摆头角度改变导致的碰撞。这些都是在CAM软件里看不到,机床空跑也难察觉的致命缺陷,通过Vericut能第一时间揪出来并修正。
Q3: 面对摆头机床换刀时自动改变摆头角度,以及3+2定位后多余的复位动作,如何通过后处理有效处理并优化?
A3: 这种是典型的效率杀手,也是撞机的隐患。教程会教你如何通过修改后处理的内部逻辑,利用TNC530的自定义循环或宏程序,智能判断换刀或定位后的姿态。通过编程控制机床平稳过渡,去除冗余的复位动作,不仅保证安全,更能显著提升加工效率,减少空跑时间。
温馨提醒
本站所有资源都是通过百度网盘下载,请自备百度网盘账号


暂无评论内容