

🔥 实战痛点解析
干了这么多年编程,我发现很多同行在搞多轴后处理时,最头疼的就是那些“玄学”问题。比如,明明刀路看着没毛病,机床一跑就多出个3+2复位,白白浪费加工时间,甚至可能造成干涉。或者,四轴五轴联动下刀姿态总是不到位,加工出的曲面精度始终达不到要求。再有,刀心刀尖补偿、刀具半径补偿这些核心参数调不好,轻则尺寸偏,重则直接报废。这些都不是小问题,很多时候就是卡在后处理的某个变量、某个逻辑上,调试起来磨人得很,没点经验根本抓不住重点。
📚 教程核心价值
硬核要点:本教程直击hyperMILL多轴后处理的痛点,手把手教你优化宏程序,彻底解决换刀前的多余3+2复位问题。深度剖析刀心输出与刀尖输出的自动补偿机制,以及RR、RL、R0刀具半径补偿的精准配置,确保加工精度。通过Vericut仿真快速定位并修复后处理中的各类Bug,尤其针对摆头机床的换刀角度自动调整、3+2和联动刀路的下刀方式优化,以及双摆台机床5轴联动起始点程序的分析与设置,助你全面掌握多轴机床的“脾气秉性”,告别撞机与过切。
| 教程深度:高级实战 | 软件环境:hyperMILL 2018 |
| 资源容量:0.91 GB | 适合人群:编程工程师、后处理开发人员、高级操机员 |
| ⚠️ 排坑避雷:本教程基于 hyperMILL 2018 录制,请确保电脑安装了同等或更高版本的软件,否则将无法打开练习图档! | |
📋 完整实录目录
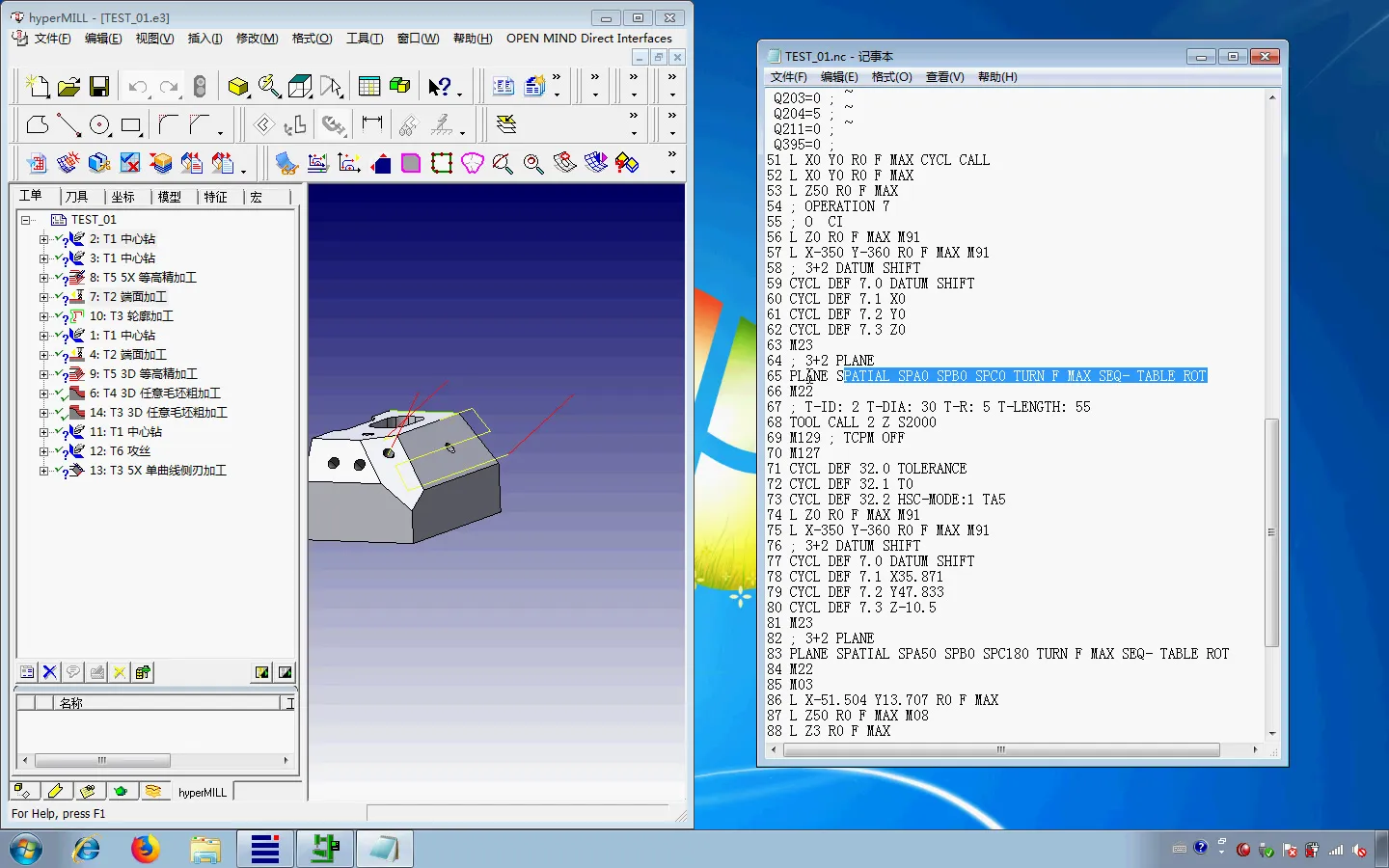
| 1. 01_通过宏程序将换刀前的一个多余3+2复位的去除_ |
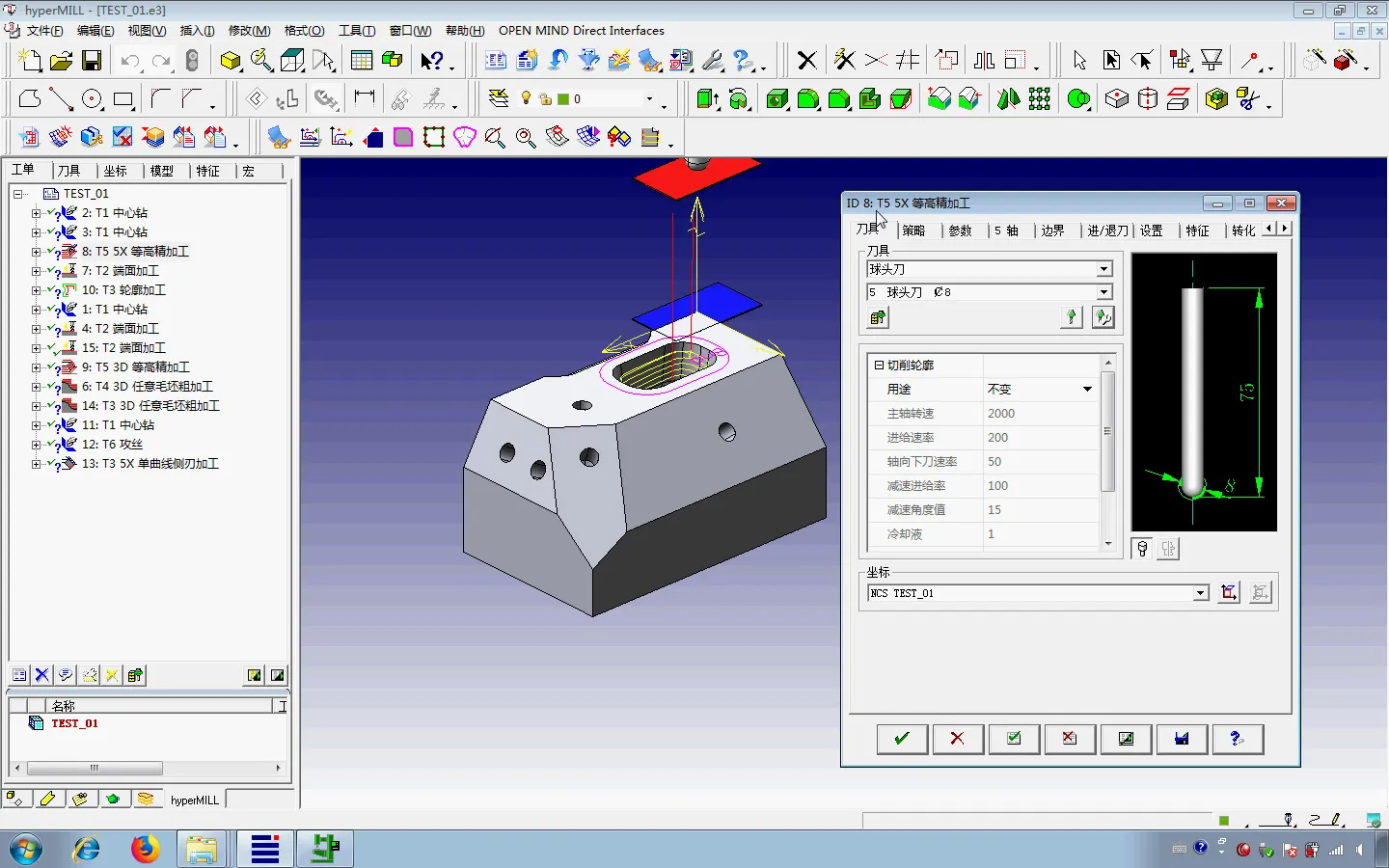
| 2. 02_刀心输出和刀尖输出的自动补偿_ |
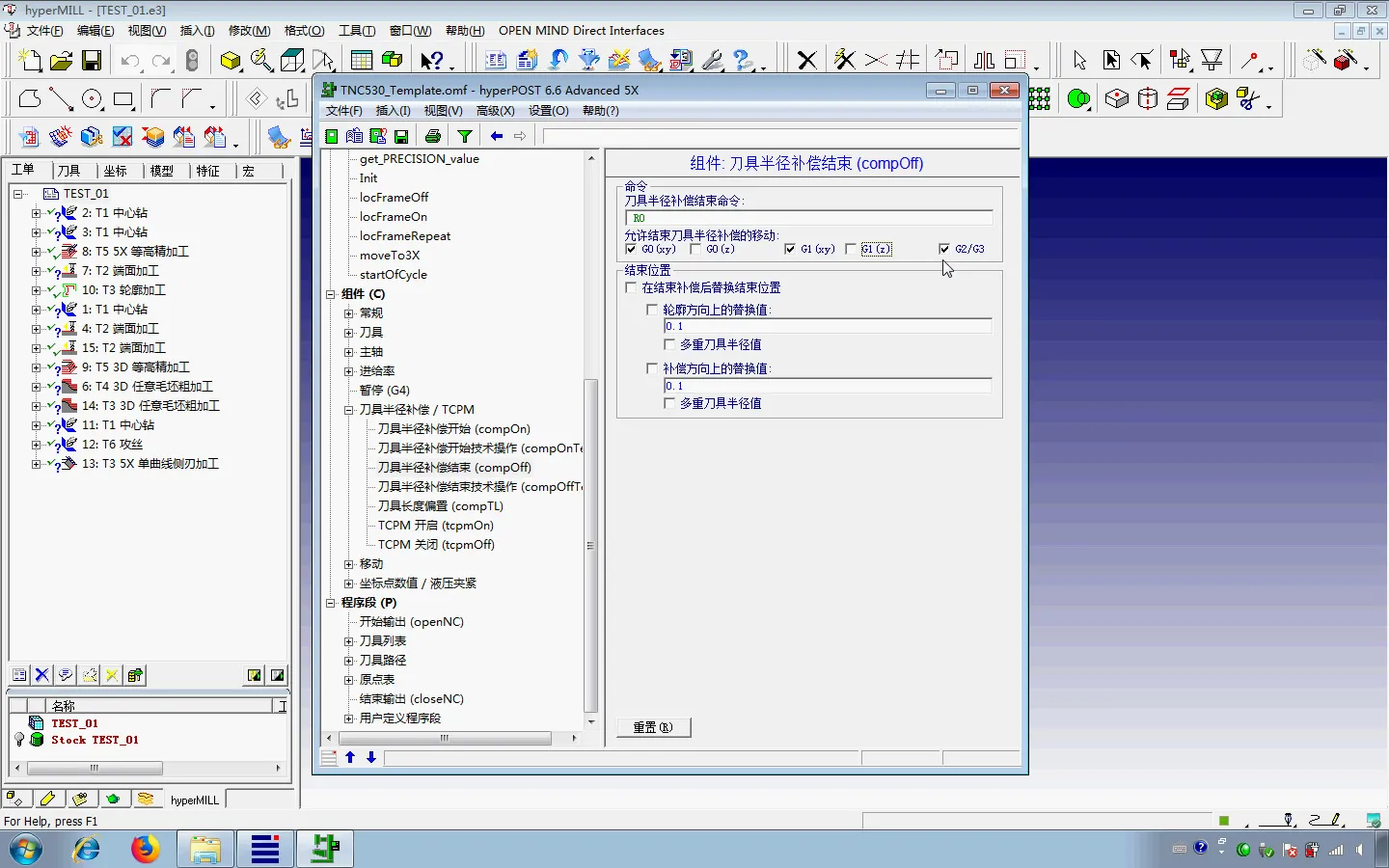
| 3. 03_刀具半径补偿的设置_RR_RL_R0_ |
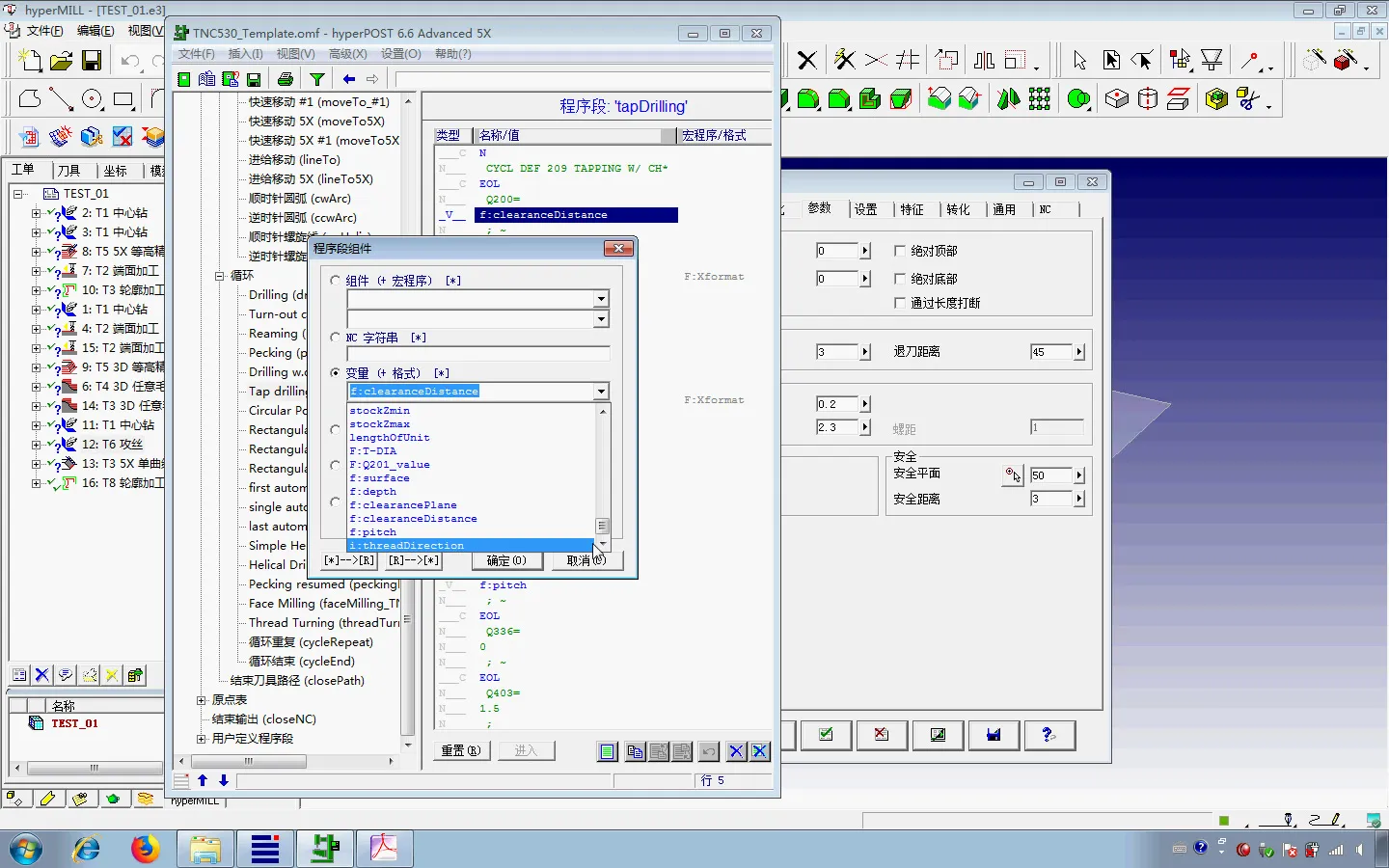
| 4. 04_如何获取所有循环的变量参数_如各类_钻孔_镗孔_螺旋钻孔_铰孔_等_ |
| 5. 06_用Vericut仿真发现后处理编写过程中的bug并修改(3+2之前的复位)_ |
| 6. 07_摆头机床换刀时摆头角度自动改变后的处理_ |
| 7. 09_摆头机床的3+2和联动刀路的下刀方式的优化设置_ |
| 8. 10_摆头机床的3+2和联动刀路的下刀方式的优化设置_补充_ |
| 9. 12_双摆台机床用3+2定位5轴联动刀路开始点的程序分析与设置_ |
📺 实机操作画面预览
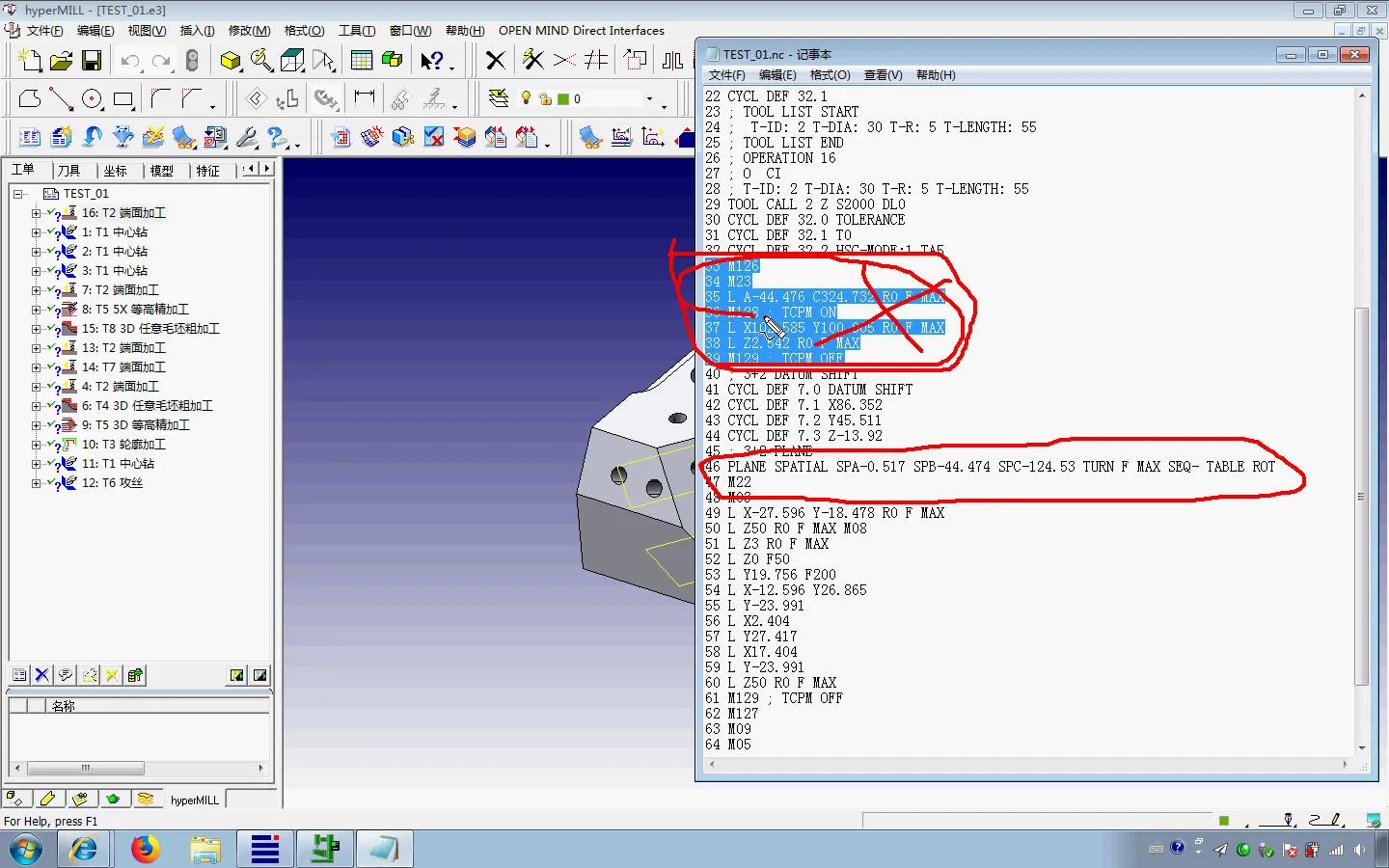
🛠️ 核心干货提炼
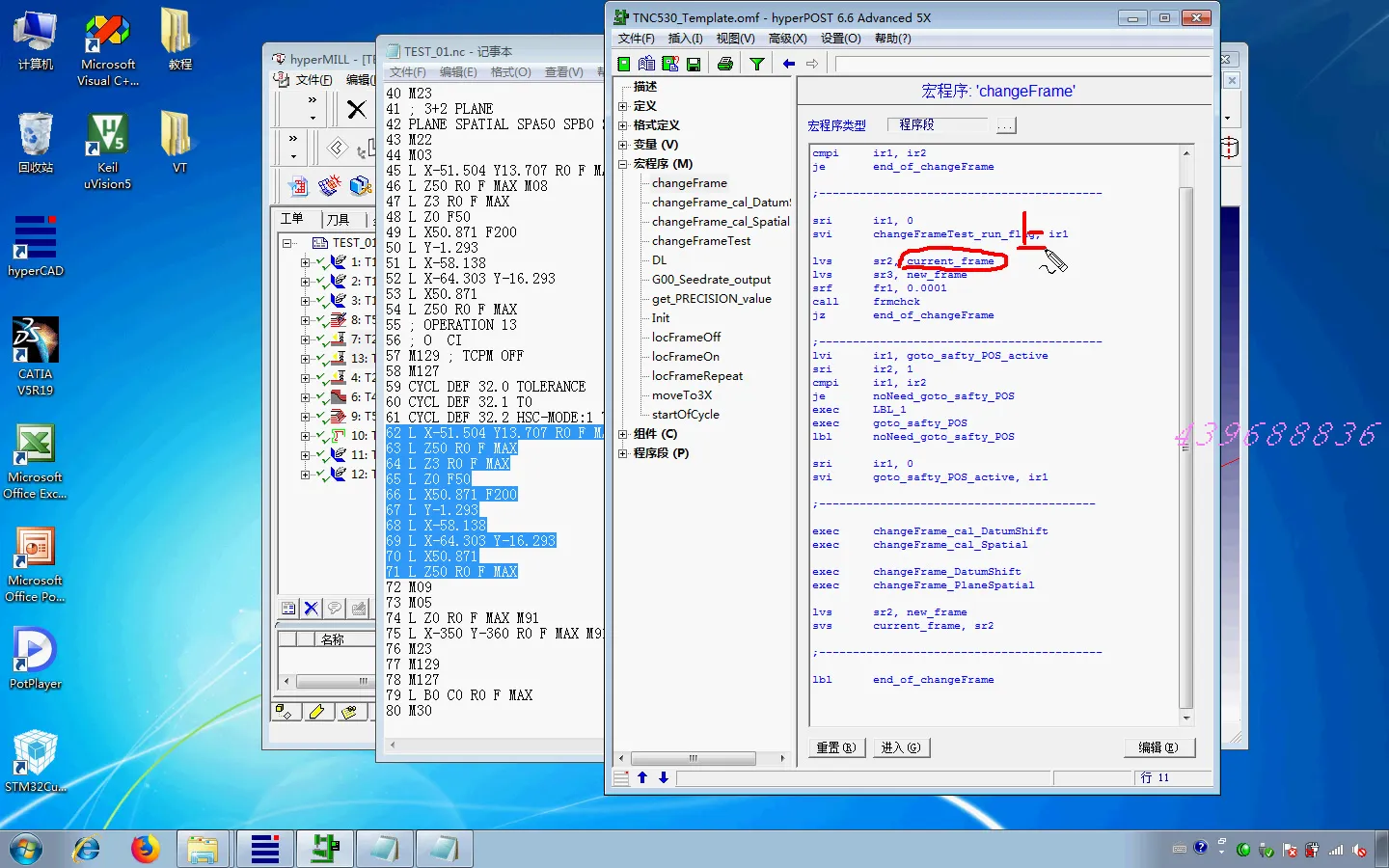
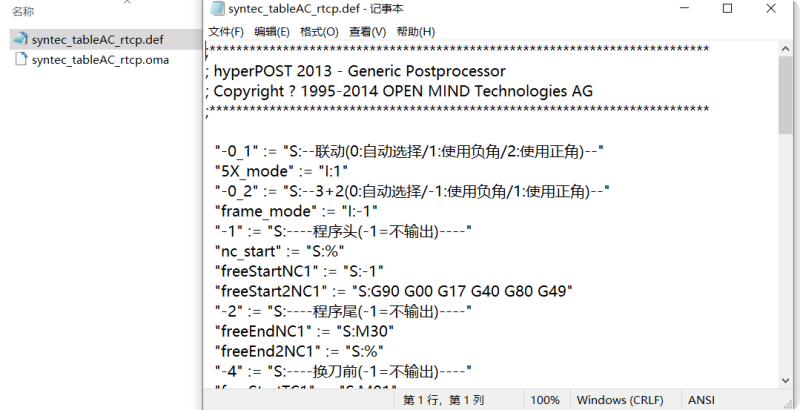
多轴宏程序定制精解
宏程序是后处理的灵魂,本教程聚焦如何高效获取各类循环的变量参数,并利用宏程序技巧去除换刀前多余的3+2复位。这能有效精简代码,减少空走刀,大幅提升机床利用率。
刀补与刀心输出高级调校
对于多轴加工,刀具半径补偿(RR、RL、R0)和刀心刀尖输出的精确控制至关重要。教程详细讲解了如何自动补偿刀心与刀尖输出,保证复杂曲面加工的几何精度,避免欠切或过切。
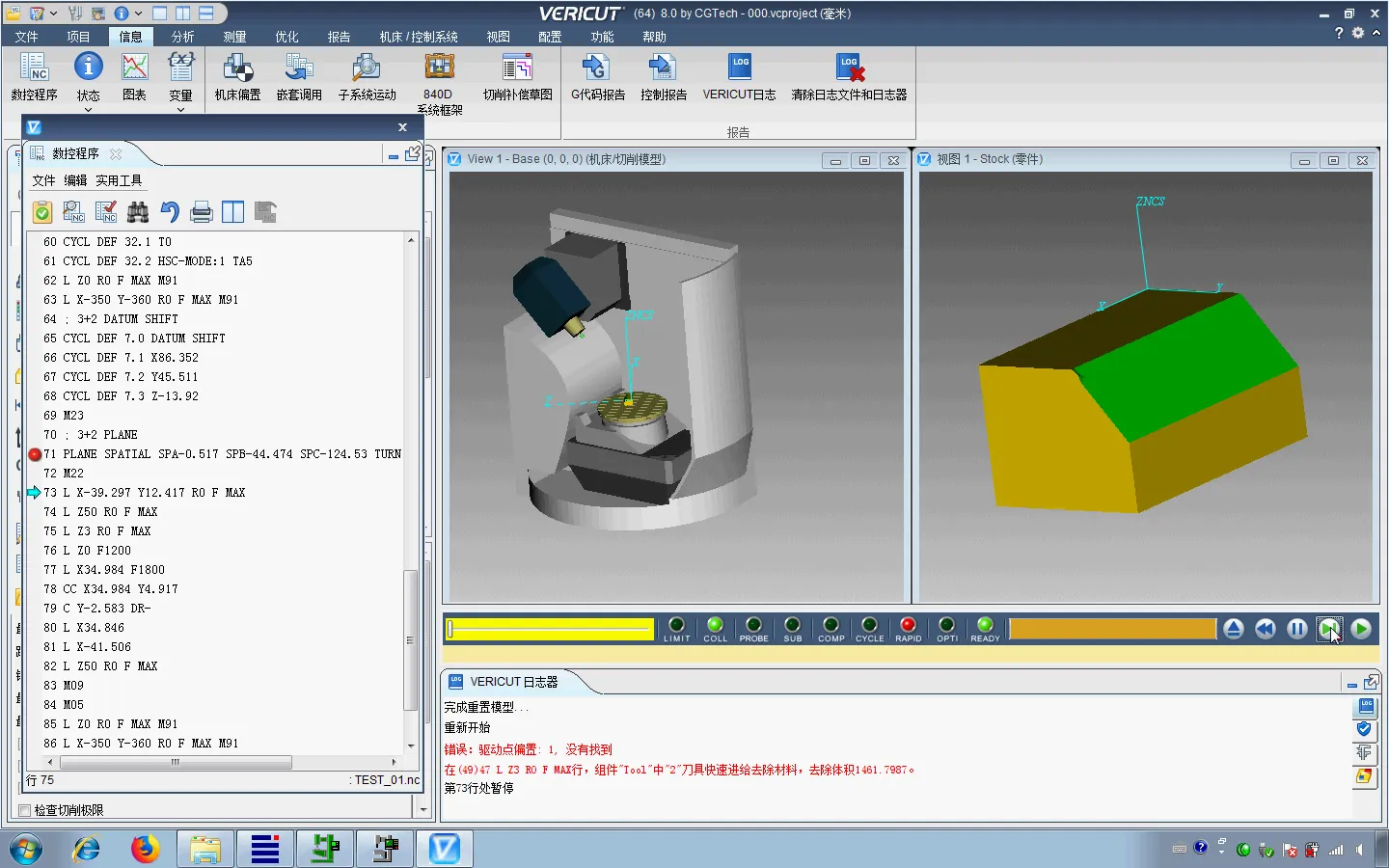
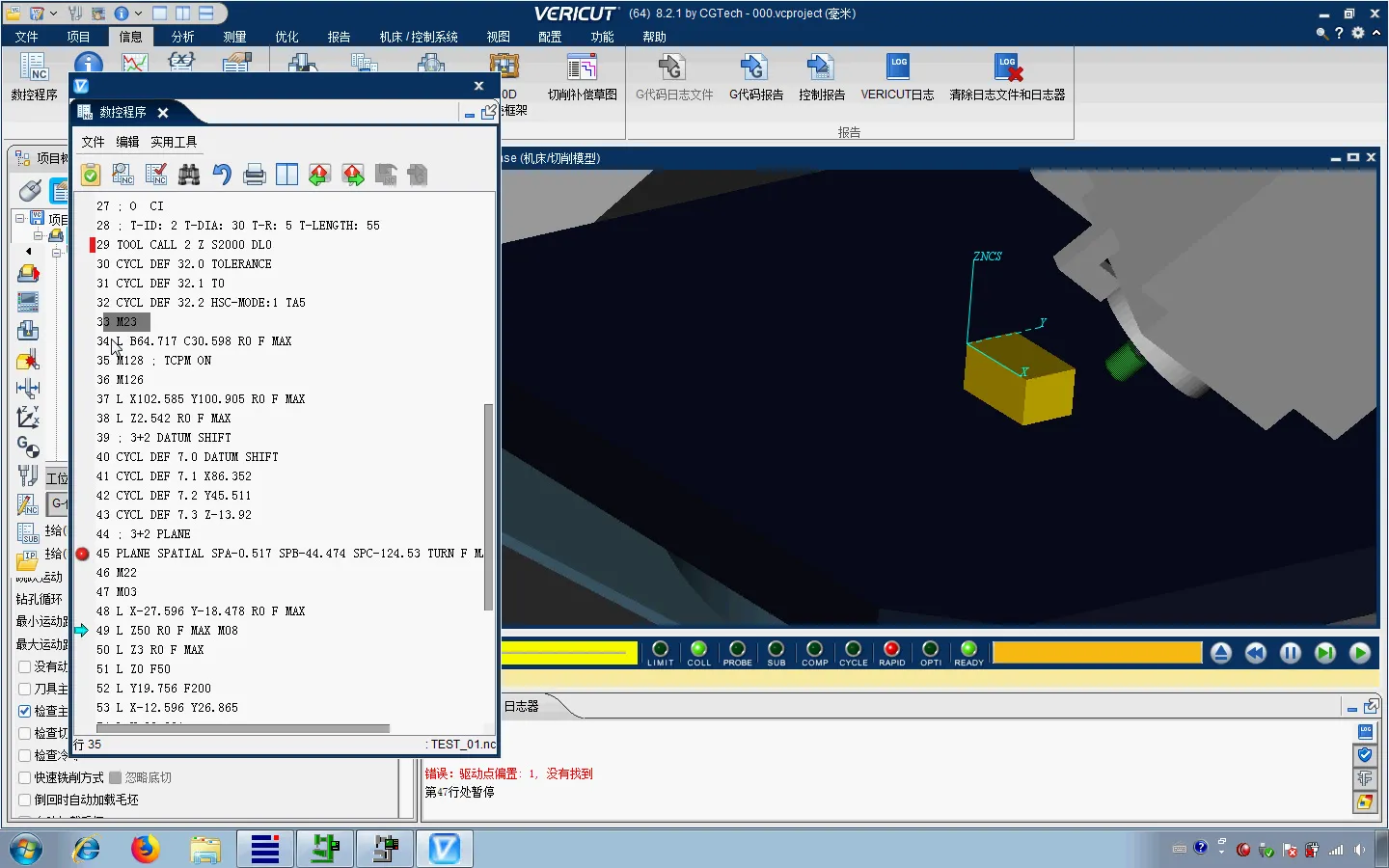
Vericut虚拟调试避坑指南
实战中,后处理的Bug常常隐藏很深。通过Vericut仿真,你能在虚拟环境中发现并修改后处理编写过程中的逻辑错误,尤其针对3+2定位的复位问题,省去上机调试的巨大成本和风险。
💡 学习者 FAQ 解答
Q1: 我的hyperMILL后处理程序,在换刀前总会莫名其妙多出一个3+2的复位动作,怎么解决?
A1: 这个问题通常是后处理宏程序逻辑中某个判断或复位指令冗余造成的。教程会教你如何通过宏程序识别并精准剔除这个多余的复位,确保换刀动作干净利落,避免不必要的机床运动。
Q2: 四轴五轴加工中,刀具半径补偿(RR、RL、R0)的设置总是让我头大,经常导致尺寸偏差,有啥窍门?
A2: 刀具半径补偿在多轴里确实是个坑,一旦弄错就废件。教程会详细拆解RR、RL、R0的适用场景和设置原理,并结合刀心刀尖输出的自动补偿,让你彻底搞懂这套逻辑,保证加工尺寸的精准性。
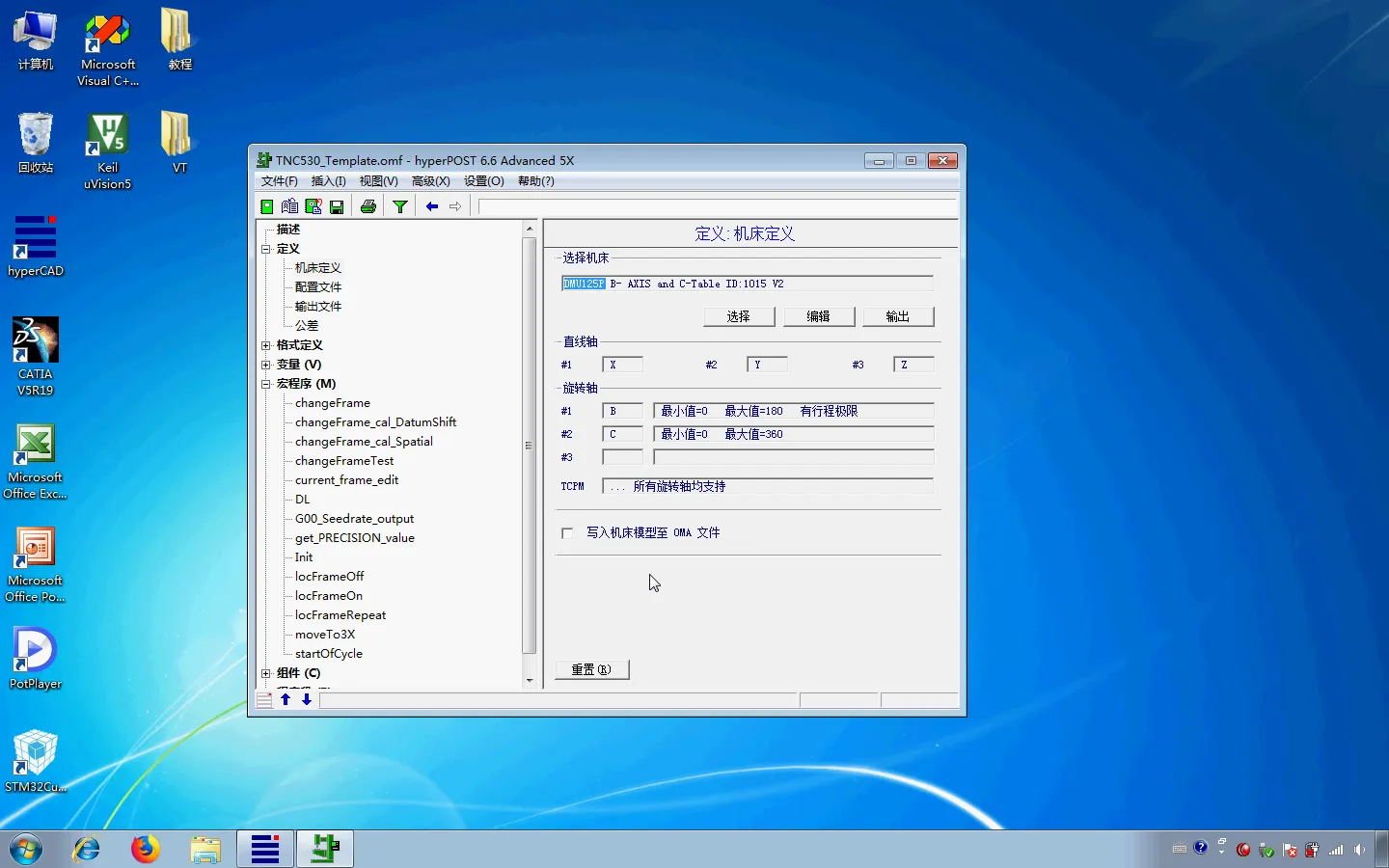
Q3: 摆头机床在进行3+2定位或联动刀路时,下刀方式和起始点程序总是不理想,容易造成碰撞或走刀不稳,如何优化?
A3: 摆头机床的多轴下刀姿态确实需要精细调整。本教程针对摆头机床换刀时角度自动改变的情况,以及3+2和联动刀路的下刀优化策略有专题讲解,包括双摆台机床5轴联动刀路起始点的程序分析与设置,确保下刀安全平稳,提升加工效率。
温馨提醒
本站所有资源都是通过百度网盘下载,请自备百度网盘账号




暂无评论内容