
🔥 实战痛点解析
搞UG NX运动仿真,最常见的坑就是各种“假装配”和“过约束”。看着模型在动,实则内在逻辑一塌糊涂,机构运行起来不是卡死就是跳帧,根本无法真实反映设计意图。很多新手连运动副的类型都分不清,更别提复杂的接触关系和驱动设置了,最终做出来的仿真报告,除了骗自己,一点工程指导意义都没有。浪费时间不说,还可能把实际的机械设计带偏。
📚 教程核心价值
硬核要点:本套教程直击UG NX运动仿真的核心,从基础的刚体、运动副构建,到复杂机构的装配与驱动逻辑,手把手教你如何搭建精准可靠的仿真模型。通过工业级案例实战,掌握机构干涉检测、运动轨迹优化,有效预测机械性能,规避设计缺陷,确保产品研发的高效与稳定。
| 教程深度:高级实战 | 软件环境:UG NX 2206 |
| 资源容量:4.09 GB | 适合人群:机械设计工程师、自动化设备开发、机构仿真分析师 |
| ⚠️ 排坑避雷:本教程基于 UG NX 2206 录制,请确保电脑安装了同等或更高版本的软件,否则将无法打开练习图档! | |
📋 完整实录目录
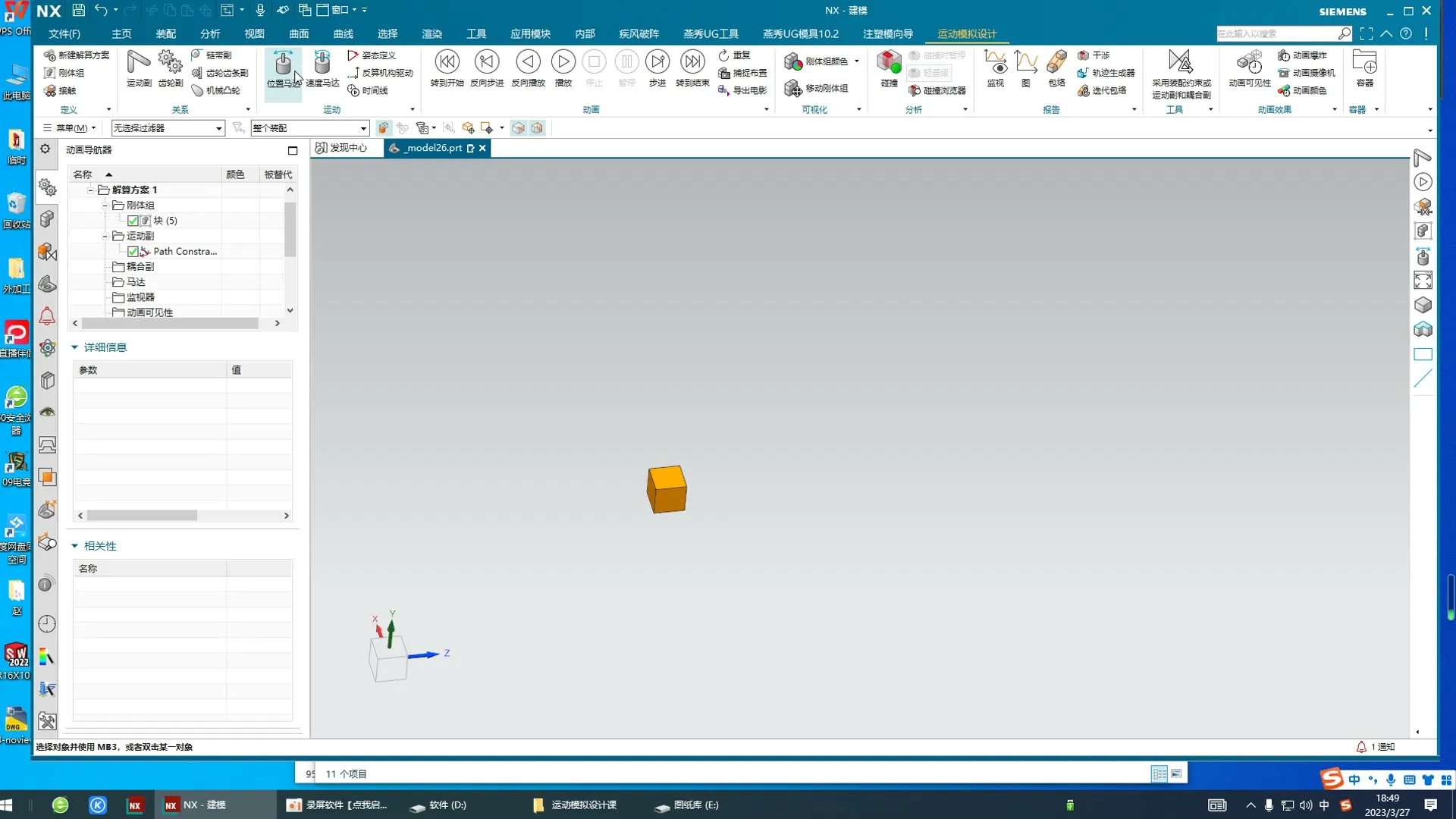
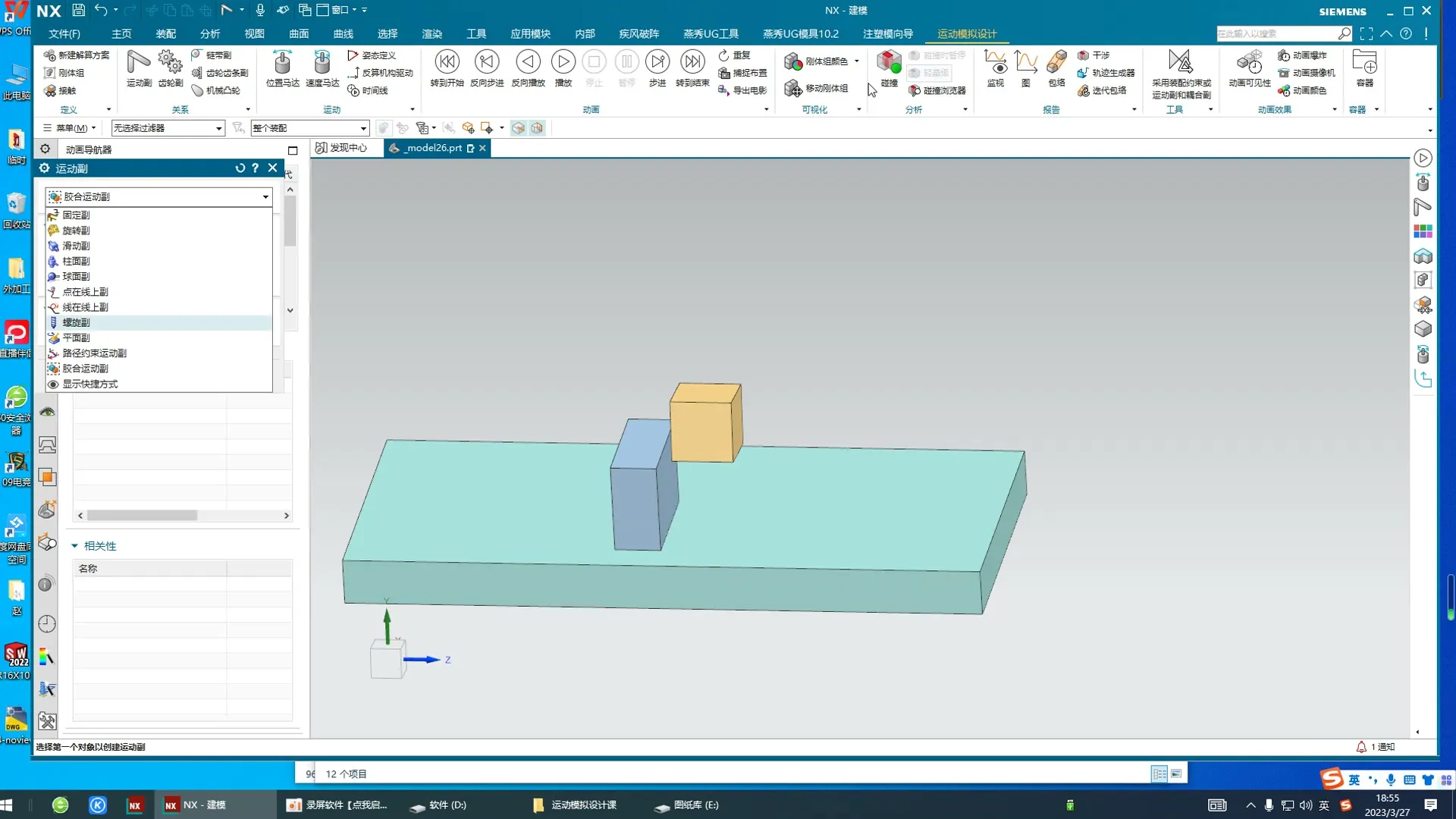
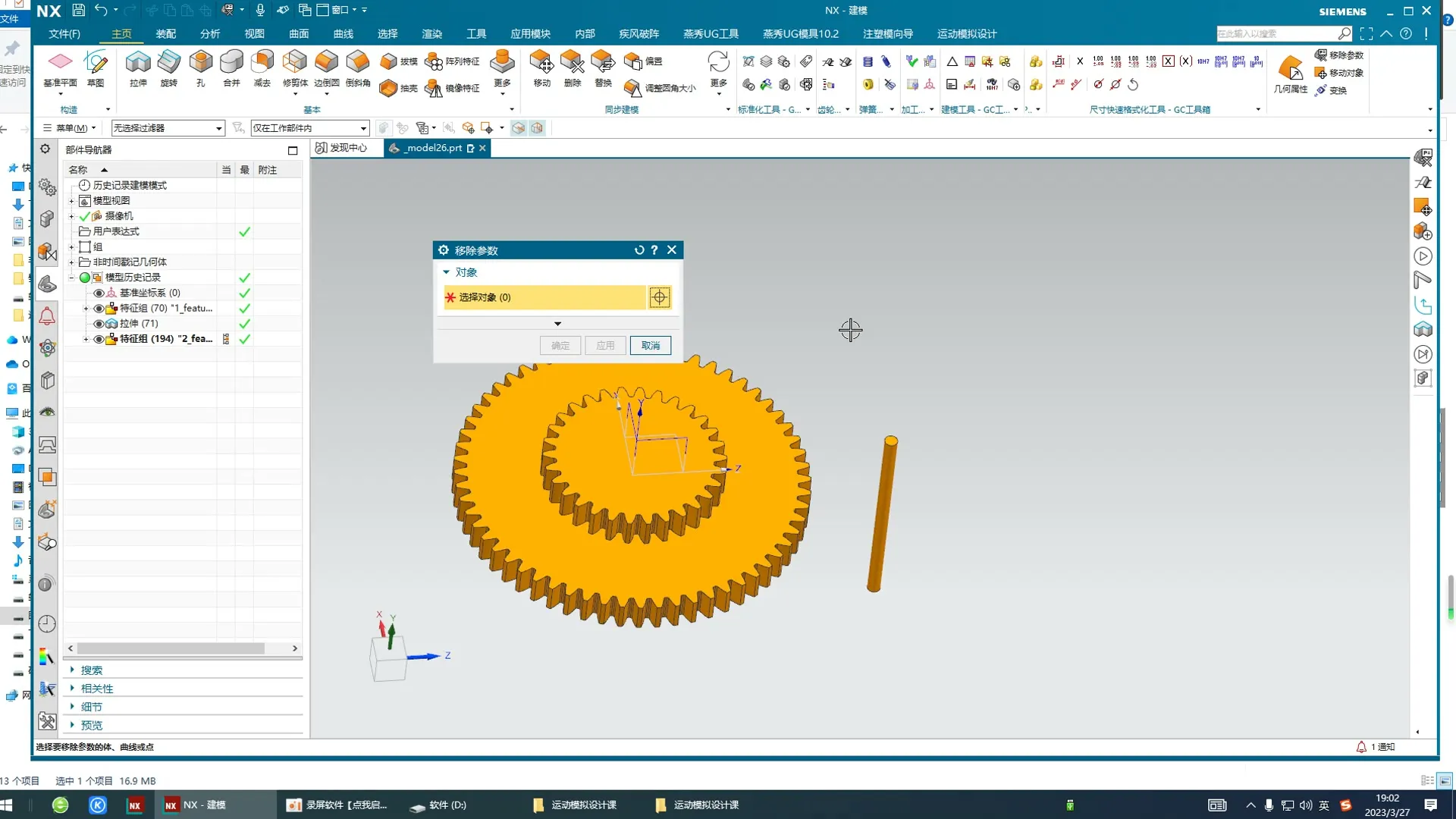
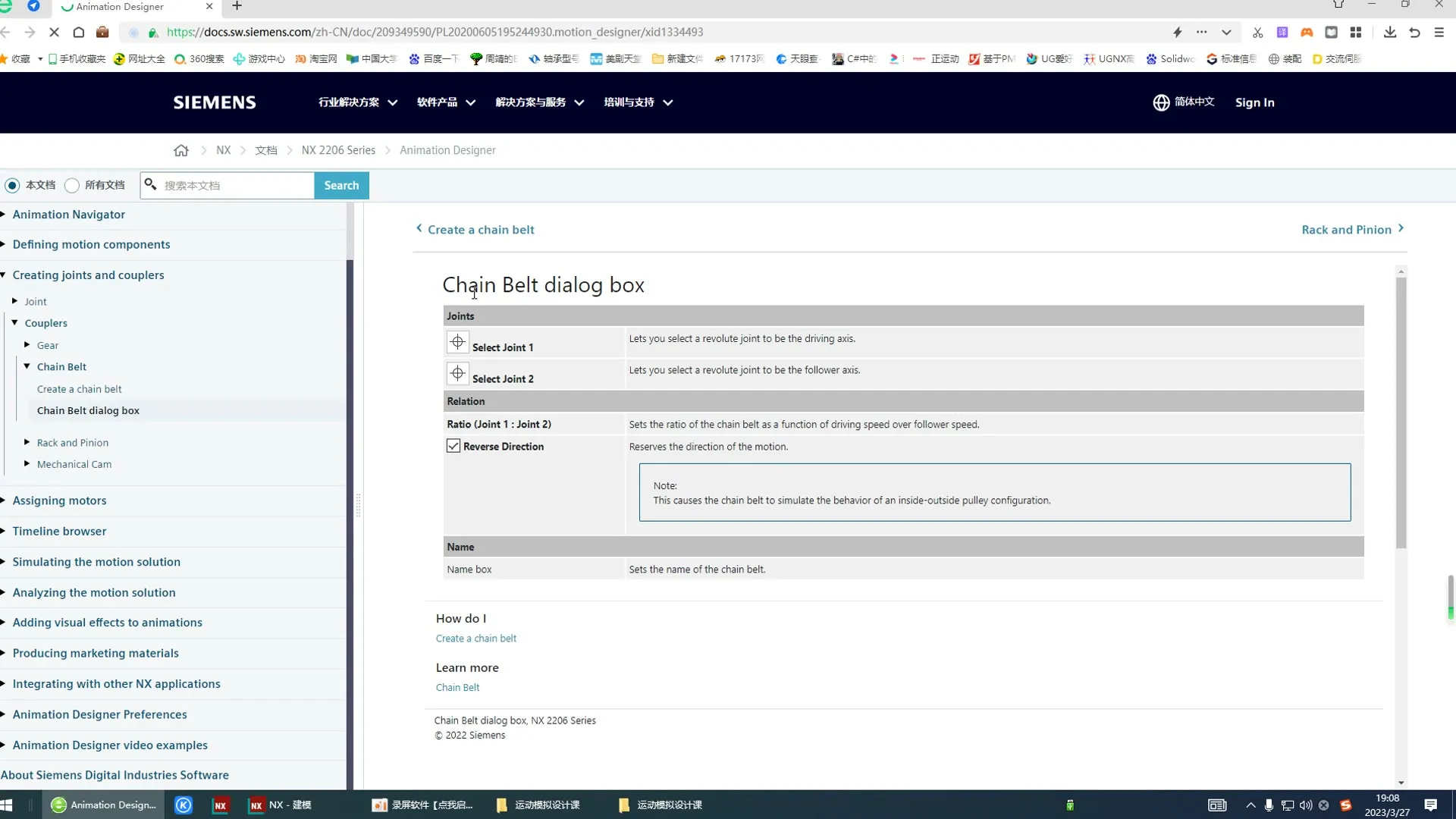
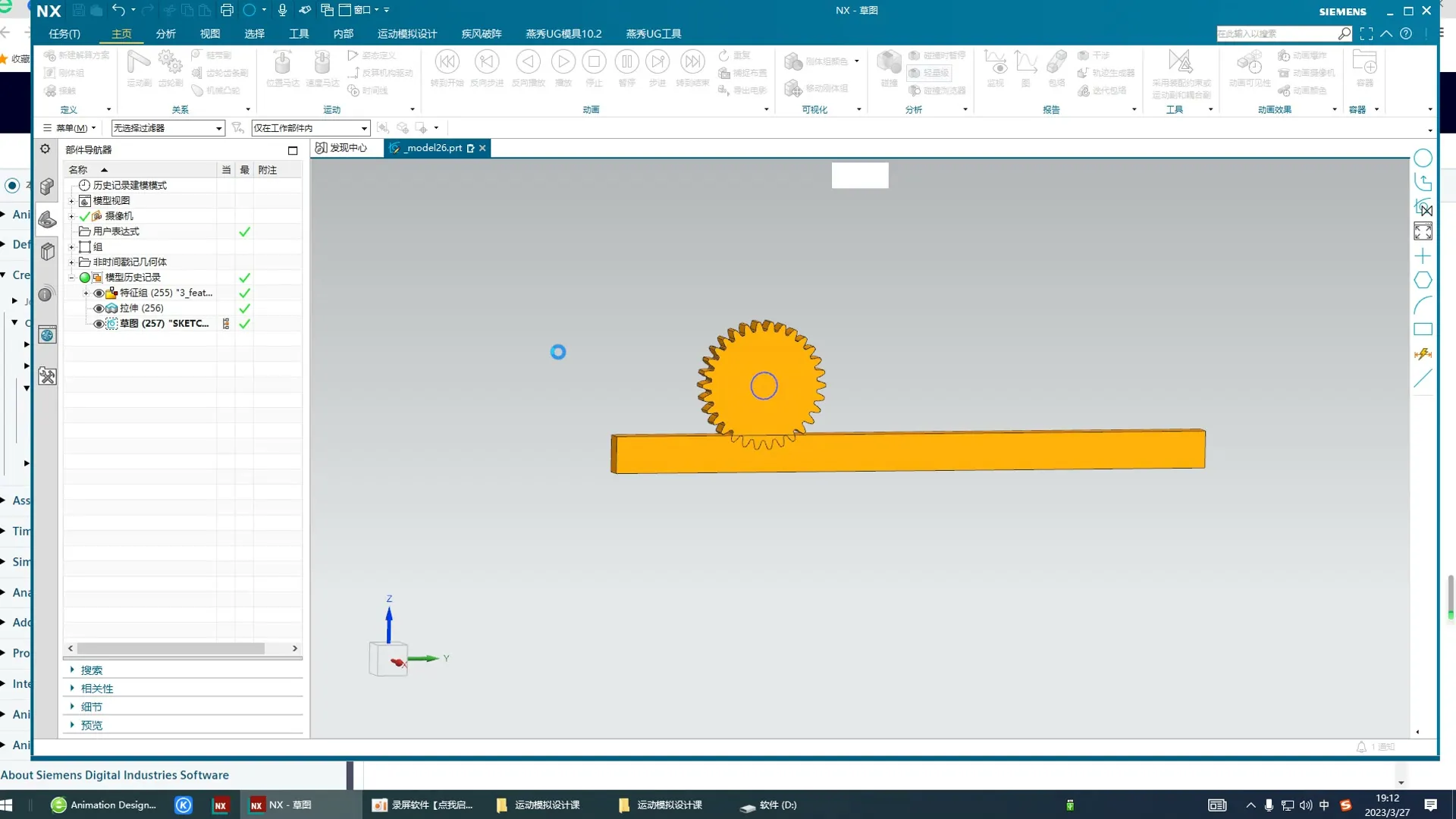
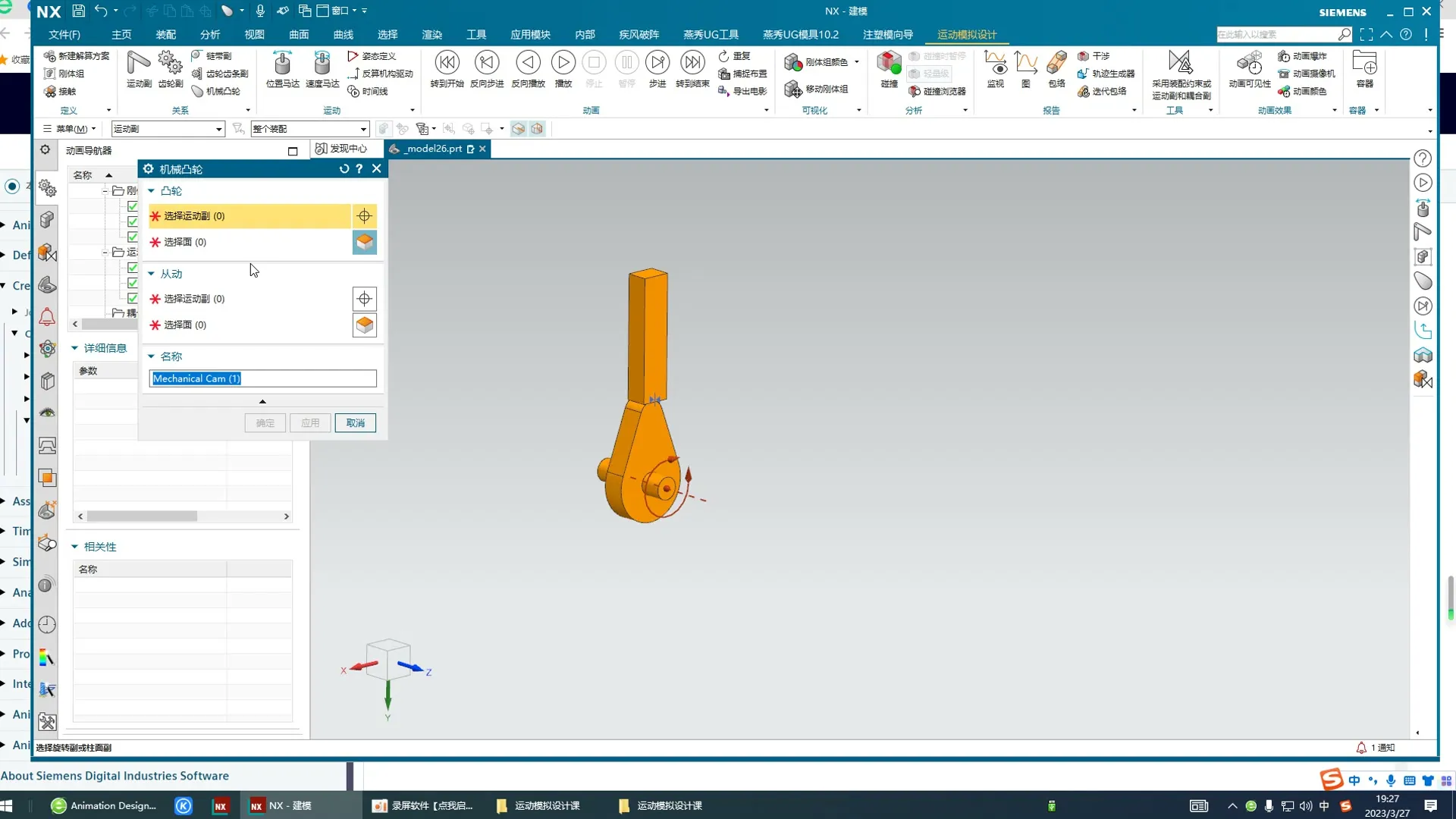
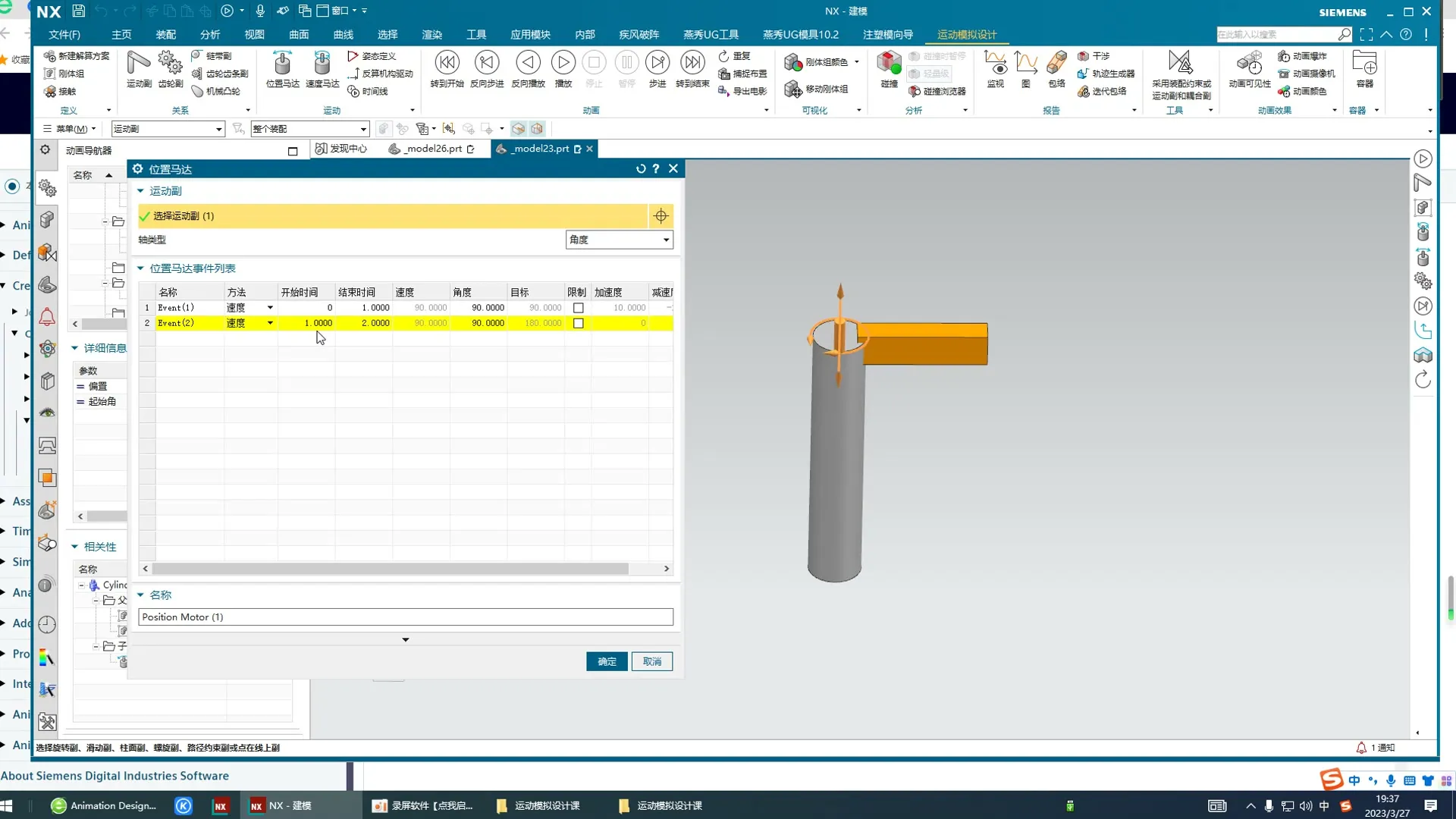
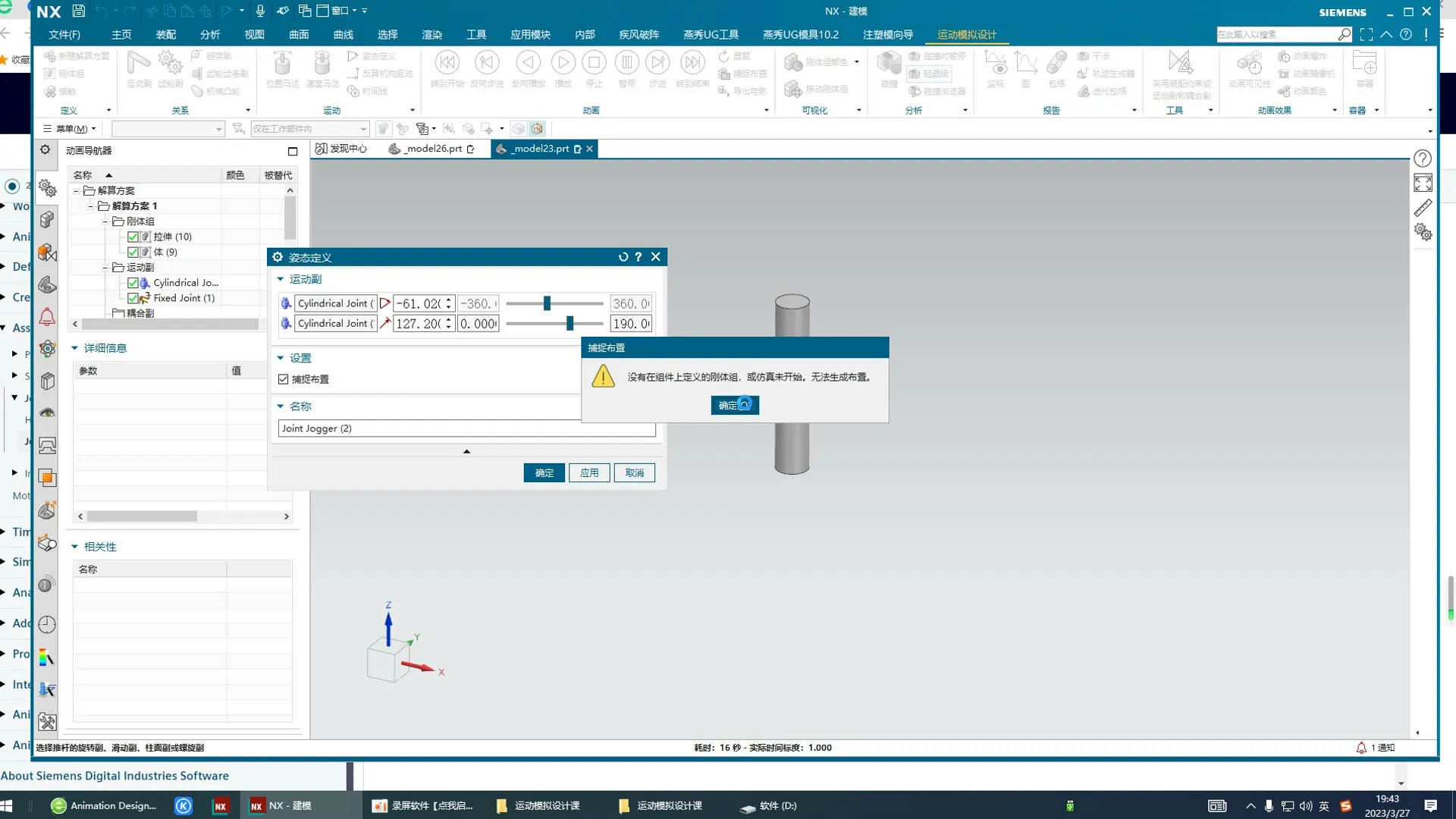
📺 实机操作画面预览
🛠️ 核心干货提炼
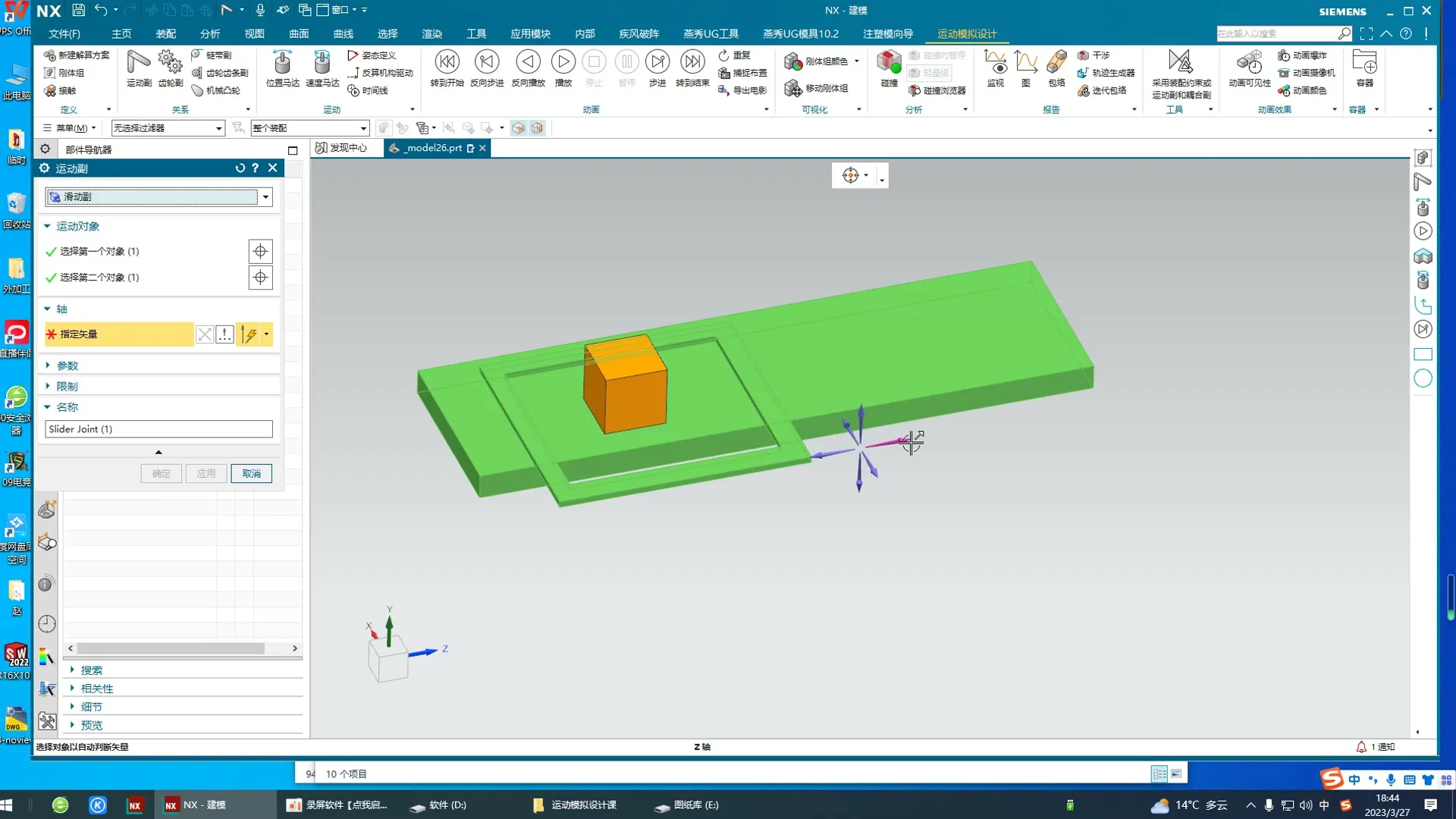
精准运动副装配逻辑
教程详细拆解了刚体、滑动副、旋转副等基础运动副的设置要点,确保机构在仿真中的运动轨迹与实际完全吻合。这是机构运动分析的基石,任何疏忽都会导致仿真结果失真。
复杂机构多体动力学解析
通过插片机、银点焊接机等复杂模型,手把手演示多关节联动机制的搭建与优化。重点讲解如何有效识别并规避运动干涉、过约束,让你的机构设计少走弯路。
工业级设备仿真验证策略
从实际生产需求出发,教会你如何利用UG NX运动仿真进行设计方案的预验证,包括速度、加速度、力矩分析,为优化机械结构和提升设备效率提供科学依据,不再凭经验拍脑袋。
💡 学习者 FAQ 解答
Q1: 运动副类型那么多,如何根据实际机构正确选择和设置参数?
A1: 教程会结合实际案例,深入剖析每种运动副的适用场景及关键参数设定,尤其是避免因运动副选择不当造成的“假运动”和“过约束”问题。
Q2: 在处理多连杆机构时,如何快速定位并解决运动干涉或卡死问题?
A2: 除了基础的接触检测,我们会讲解通过仿真图谱分析,快速锁定干涉点和卡死原因,并提供多种优化策略,比如调整运动范围、修改零件形状等。
Q3: UG NX运动仿真结果,如何有效指导我改进机械设计?
A3: 仿真并非目的,而是手段。教程强调如何从运动仿真报告中提取关键数据,如驱动力、部件应力分布、轨迹偏差等,将其反哺到设计迭代中,实现性能与成本的最佳平衡。
温馨提醒
本站所有资源都是通过百度网盘下载,请自备百度网盘账号




- 最新
- 最热
只看作者