🔥 实战痛点解析
干了这么多年编程,我发现很多做机电一体化的哥们,在UG的MCD模块里搞虚拟调试时,经常卡壳。最大的坑就是对运动学和动力学概念理解不透,导致刚体、约束、碰撞体的定义一塌糊涂。仿真跑起来不是卡死就是结果驴唇不对马嘴,根本指导不了实际设计。更别提复杂的链条、拖链机构,往往因为运动学链没建对,直接变成一堆乱麻,虚拟调试反而成了浪费时间的摆设。
📚 教程核心价值
硬核要点:本教程系统剖析ugNX MCD机电概念设计的核心逻辑,从模块界面到运动学动力学原理,再到刚体、碰撞体与序列编辑器的精细化应用。尤其针对链条、拖链这类复杂机构的运动仿真,提供一套可实战落地的虚拟调试解决方案,帮助你精准预判机械运动行为,大幅提升机电系统设计与优化效率,有效规避物理样机阶段的潜在问题。
| 教程深度:提升 |
软件环境:ugNX 2206 |
| 资源容量:2.07 GB |
适合人群:机械设计师、机电工程师、自动化工程师、UG用户 |
|
⚠️ 排坑避雷:本教程基于 ugNX 2206 录制,请确保电脑安装了同等或更高版本的软件,否则将无法打开练习图档!
|
📋 完整实录目录
📋 完整教学大纲 (共 68 节)
温馨提示:框内可上下滑动查阅全部目录
|
01. 01.1.MCDNX运动仿真说明
|
|
02. 02.2.MCD模块的历史和展望
|
|
03. 03.3.MCD模块界面介绍和进出MCD模块
|
|
04. 04.4.理解运动学和动力学的区别
|
|
05. 05.5.刚体的创建理论和使用详解
|
|
06. 06.6.机电导航器
|
|
07. 07.7.对象源命令和案例
|
|
08. 08.8.运行时查看器
|
|
09. 10.9.碰撞体的定义和定义规范技巧
|
|
10. 11.10.序列编辑器
|
|
11. 12.11.对象收集器命令和案例
|
|
12. 13.12.对象变换器命令和案例
|
|
13. 14.13.发送器入口和出口命令和案例
|
|
14. 15.14.防止刚体间碰撞
|
|
15. 16.15.更改碰撞材料属性和设置碰撞材料
|
|
16. 17.16.固定副定义和案例
|
|
17. 18.17.铰链副定义和案例
|
|
18. 19.18.滑动副定义和案例
|
|
19. 20.19.柱面副定义和案例
|
|
20. 21.20.球副定义和案例
|
|
21. 22.21.点在线上副定义和案例
|
|
22. 23.22.线在线上副定义和案例
|
|
23. 24.23.螺旋副定义和案例
|
|
24. 25.24.平面副定义和案例
|
|
25. 26.25.路径约束运动副和案例
|
|
26. 27.26.虚拟轴运动副
|
|
27. 28.27.PLC的基础知识
|
|
28. 29.28.电气元器件的认识
|
|
29. 30.29.资料的下载和软件的准备
|
|
30. 31.30.编程的核心,位,字,字节,双字
|
|
31. 32.31.符号表
|
|
32. 33.32.信号
|
|
33. 34.33.信捷PLC与NX的连接
|
|
34. 35.34.触摸屏绘制和信捷连接跟NX连接
|
|
35. 36.35.气缸和电磁阀的定义
|
|
36. 37.36.位置控制和速度控制命令
|
|
37. 38.37.脱机仿真案例,脱机仿真
|
|
38. 39.38.PLC的软元件
|
|
39. 40.39.PLC的软元件2
|
|
40. 41.40.PLC程序如何与NX MCD模块联动
|
|
41. 42.41.气缸的传感器如何实现与PLC程序联动
|
|
42. 43.42.手动程序怎么写
|
|
43. 44.43.整形机案例
|
|
44. 45.44.循环停止和暂停的写法和仿真
|
|
45. 46.45.急停的其中一种写法
|
|
46. 47.46.总产量的PLC统计程序怎么写
|
|
47. 48.47.每分钟产量的PLC程序怎么写
|
|
48. 49.48.角度弹簧副和案例
|
|
49. 50.49.角度限制副和案例
|
|
50. 51.50.线性弹簧副.断开约束,线性距离,弹簧阻尼器
|
|
51. 52.51.齿轮耦合副和案例
|
|
52. 53.52.齿轮齿条耦合副和案例
|
|
53. 54.53.三连接耦合副
|
|
54. 55.54.滑轮和带耦合副
|
|
55. 56.55.运行时参数和运行时表达式
|
|
56. 57.56.代理对象和案例
|
|
57. 58.57.标记表,标记表单和读写设备
|
|
58. 59.58.显示更改器和案例
|
|
59. 60.59.容器命令
|
|
60. 61.60.握爪命令吸盘和案例
|
|
61. 62.61.握爪对齐选项设置
|
|
62. 63.62.对齐体,动态对象实例化和案例
|
|
63. 64.63.手指握爪的仿真案例
|
|
64. 65.64.轨迹生成器
|
|
65. 66.65.观察变量命令
|
|
66. 67.66.链条的仿真和点在曲线上运动学链命令
|
|
67. 68.67.拖链的运动仿真
|
|
68. 69.68.运行时按钮
|
— 目录到底啦,共计 68 个文件 —
📺 实机操作画面预览
📸 截图选自: MCDNX运动仿真说明
📸 截图选自: MCD模块的历史和展望
📸 截图选自: MCD模块界面介绍和进出MCD模块
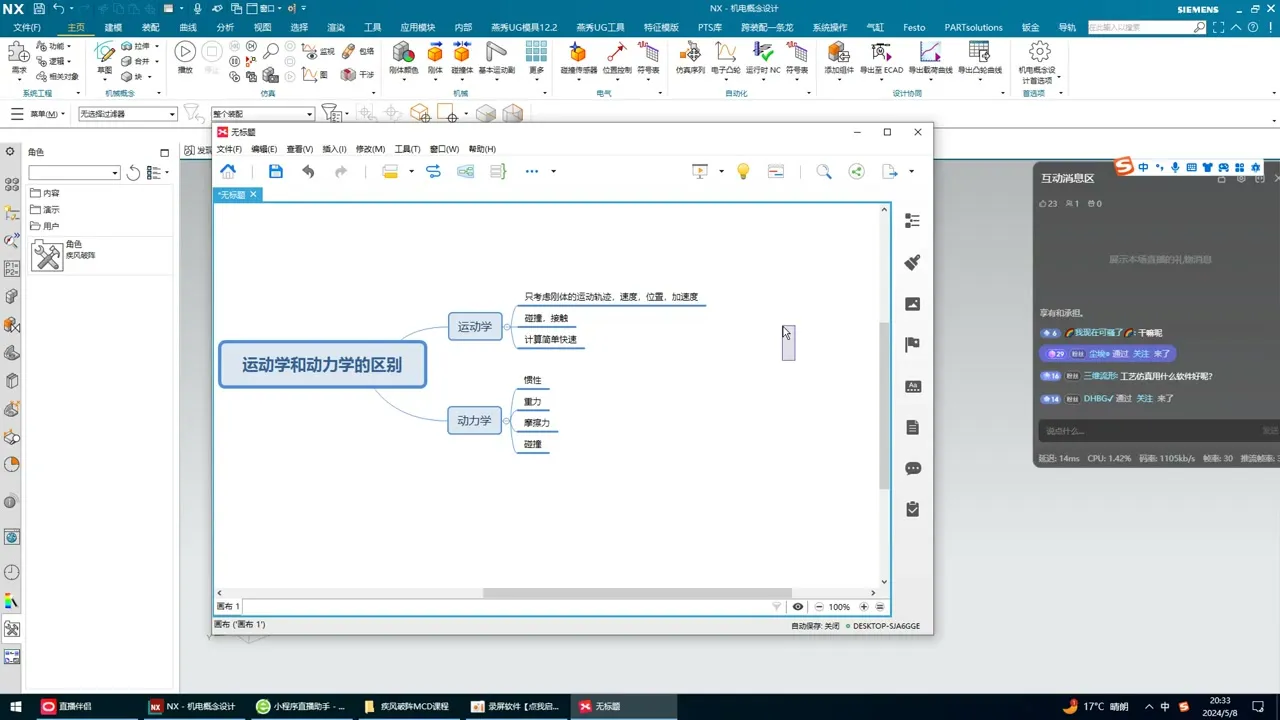
📸 截图选自: 理解运动学和动力学的区别
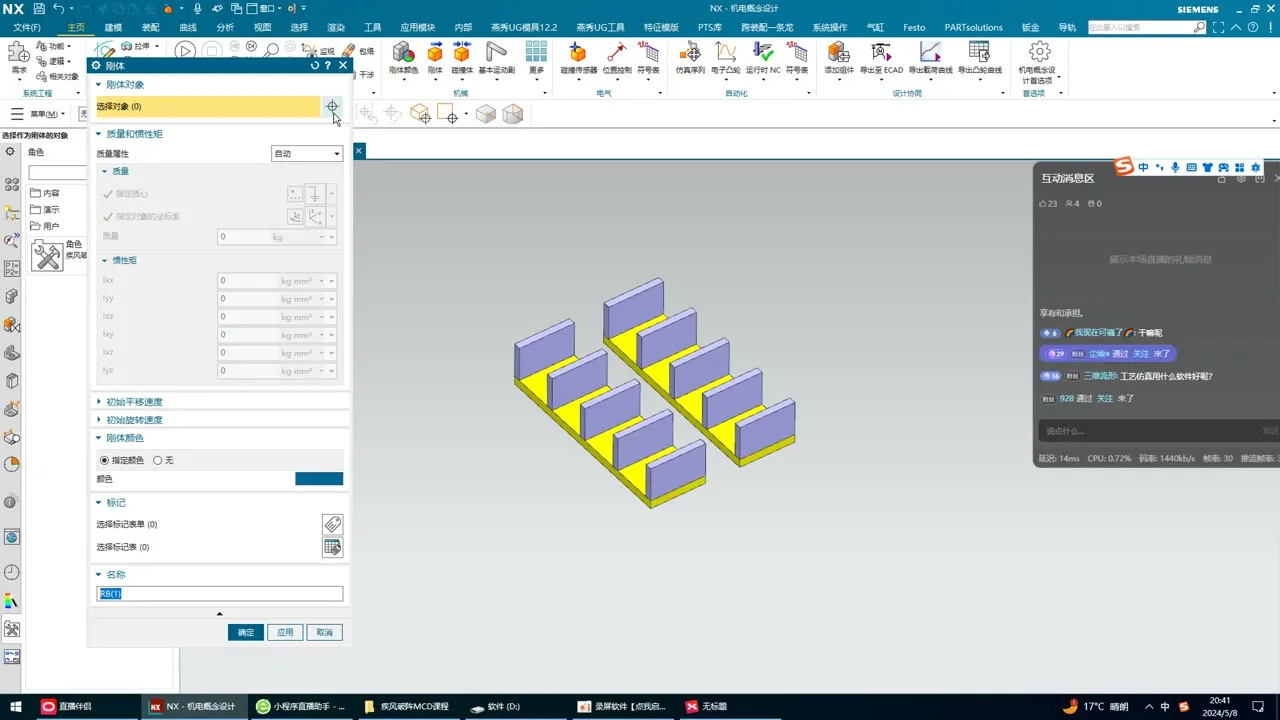
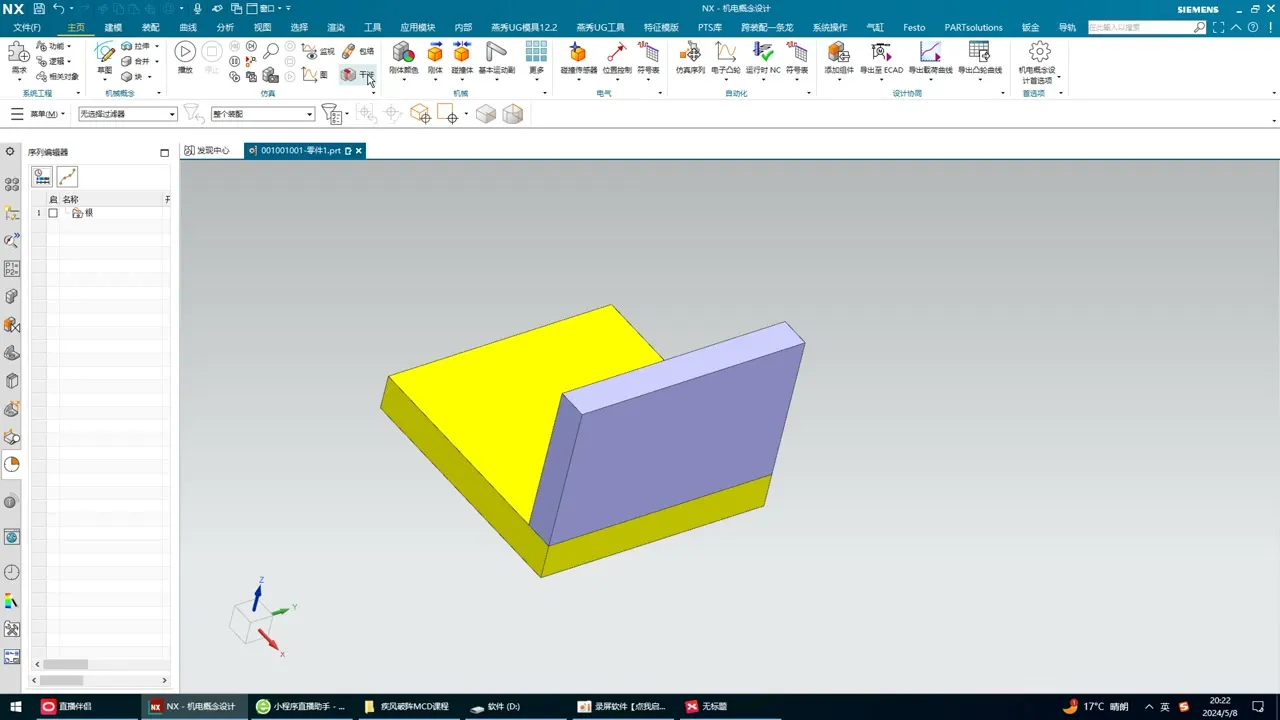
📸 截图选自: 刚体的创建理论和使用详解
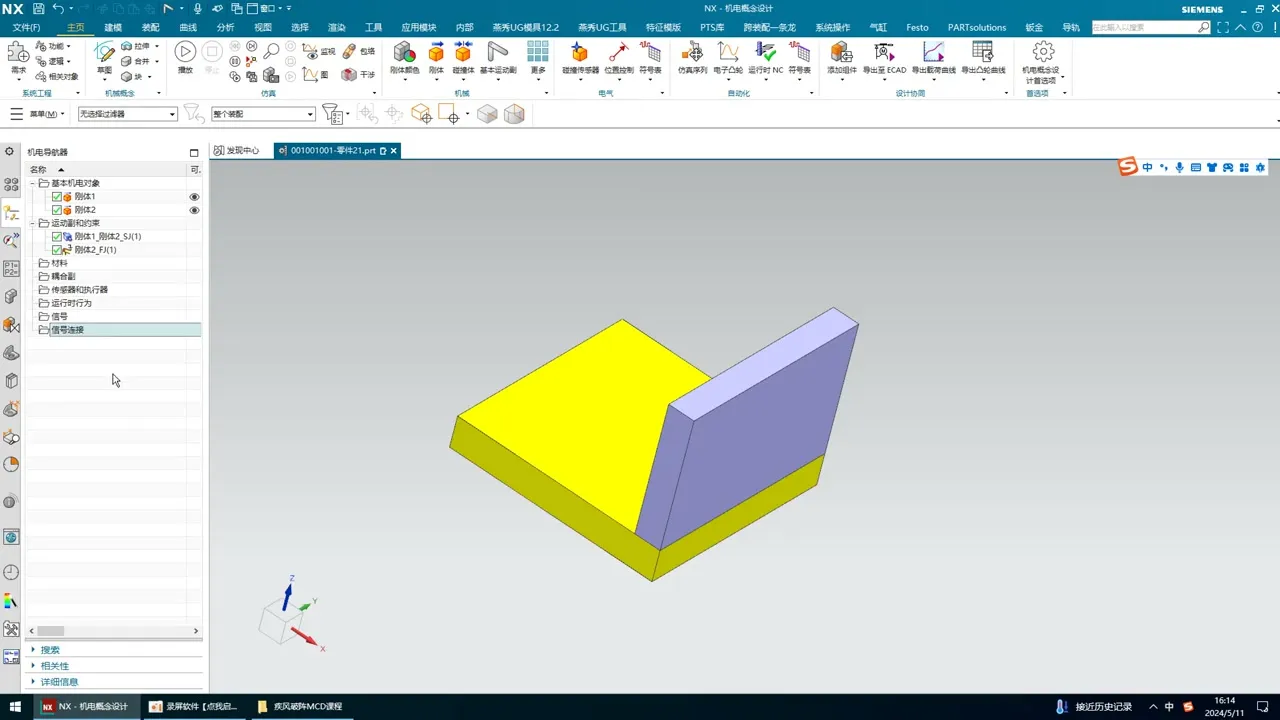
📸 截图选自: 机电导航器
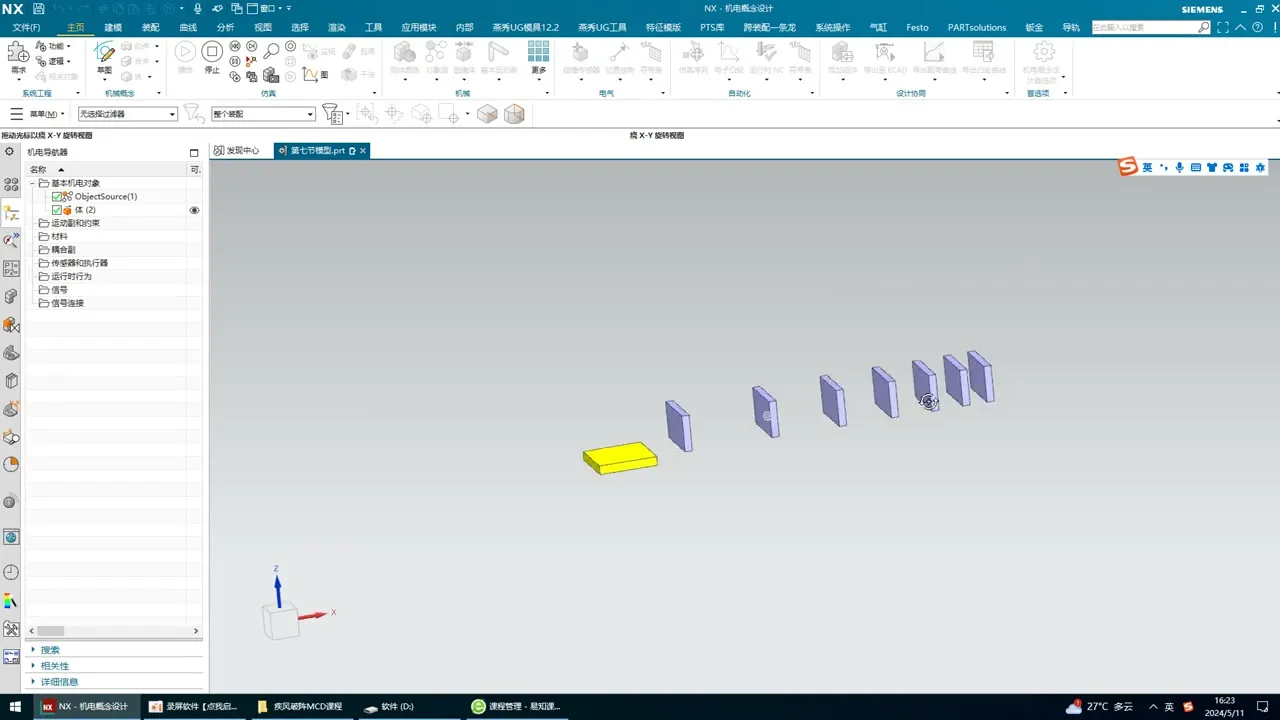
📸 截图选自: 对象源命令和案例
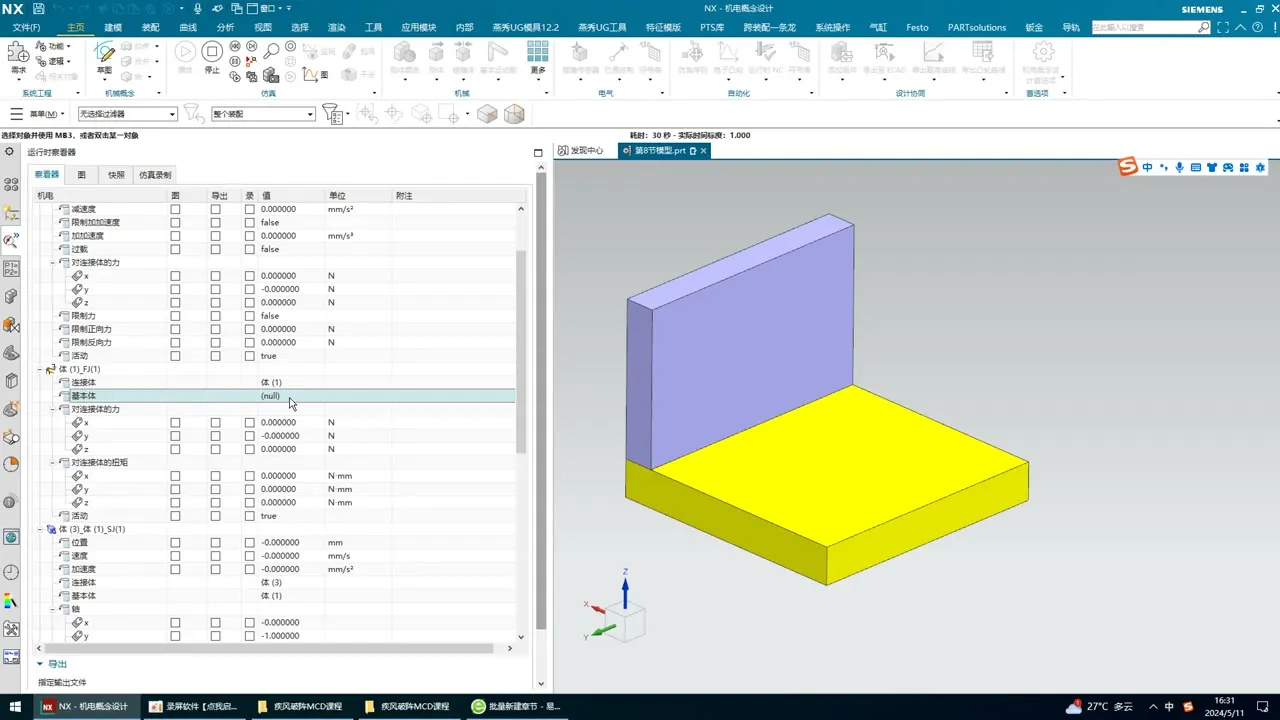
📸 截图选自: 运行时查看器
📸 截图选自: 碰撞体的定义和定义规范技巧
📸 截图选自: 序列编辑器
🛠️ 核心干货提炼
MCD模块进阶操作与界面深挖
这不仅仅是教你点点鼠标,更是让你理解MCD模块背后逻辑,包括导航器、运行时查看器等高级工具的运用,从而快速上手复杂仿真任务。
刚体、约束与碰撞体精确定义
虚拟调试的基石就是精确定义。教程深入讲解刚体创建理论、碰撞体的规范定义技巧,帮助你建立与真实世界高度匹配的数字模型,杜绝仿真中的假象和误差。
链条拖链运动学仿真与结果分析
针对柔性链条和拖链这类复杂机构,手把手教你如何进行运动学链命令设定、轨迹生成与变量观察,让你能精准预测其运动状态,提前规避设计风险。
💡 学习者 FAQ 解答
Q1: 运动学和动力学在MCD里怎么区分和应用,才能有效指导我的设计?
A1: 运动学关注的是纯粹的几何运动关系,比如位置、速度、加速度;动力学则在此基础上引入了力、质量和惯性,分析系统在受力下的行为。MCD里理解这俩的区别,能让你根据设计目标选择合适的分析模式,避免不必要的计算量,提升仿真效率和准确性。
Q2: 如何规避复杂的碰撞干涉检测中的误报或漏检,确保虚拟调试的可靠性?
A2: 关键在于碰撞体的精准定义和规范技巧。要针对性地设置碰撞组、调整碰撞体形状,甚至利用“排除”功能规避已知的非干涉区域。同时,运行时的碰撞查看器要配合“碰撞体定义规范”去调试,防止过切或未检测到实际碰撞,让仿真结果更贴近真实工况。
Q3: 链条、拖链这类柔性体在MCD中如何实现准确仿真,避免模型僵硬或失真?
A3: 柔性体的仿真是个难点。MCD提供了专门的运动学链命令和拖链仿真功能。关键是正确定义链节之间的连接关系和运动约束,并结合轨迹生成器进行运动轨迹规划,确保其符合实际的物理弯曲和伸缩特性,这样才能得到可靠的仿真结果。
温馨提醒
本站所有资源都是通过百度网盘下载,请自备百度网盘账号





暂无评论内容